MASのモデル
アリの行列モデル
アリはどうして行列をつくるの?
庭や公園などでアリが行列をつくっているのを見かけたことがあるかと思います。しばしば、家の中まで行列を作ってしまうこともありますね。どうしてアリは行列を作るのでしょうか?

アリは目があまり良くありません。そのため、アリ同士は目ではなく主に「ニオイ」でコミュニケーションをとります。 アリは様々な「フェロモン」と呼ばれるニオイ物質を作り出し、エサがあることや、危険が近づいたことなどを他のアリに知らせます。
アリは、周囲にエサがあることを知らせるフェロモンを見つけると、その方向に向かって移動していきます。 このようにフェロモンのより強い方向を辿っていくことで最終的にエサに辿り着くことができます。 エサにありついたアリは、エサがあることを知らせるフェロモンを地面に付けながら巣に戻ります。 これが繰り返されることで、徐々に濃いフェロモンの道路が出来上がり、これを多くのアリが辿っていくことで行列になります。
行列ができる様子をシミュレーションで再現
どのアリもエサの場所を知らない状況から、行列ができるまでの様子をシミュレーションで再現してみましょう。
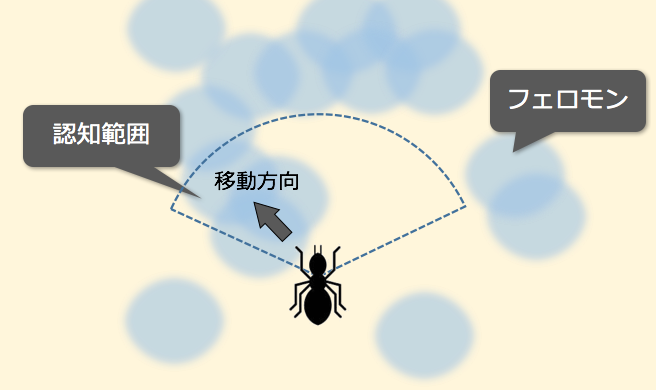
アリの行動モデルとして以下のように定義します。 なお、モデルの簡単化のためにフェロモンは1種類のみとします。 また、アリがフェロモンを認知できる範囲を限定します。
① 餌を探索している場合
・周囲にフェロモンがない場合は、ランダムな方向に移動
・周囲にフェロモンがある場合は、周囲のフェロモンの濃い方向に移動
・帰り道を忘れないために、少ないフェロモンを地面につける
・障害物にぶつかった場合は向きを変える
② エサを見つけた場合
・エサを1つ取り180度向きを変える(来た方向に向きを変える)
③ 餌を持っている場合
・周囲にフェロモンがない場合は、ランダムな方向に移動
・周囲にフェロモンがある場合は、周囲のフェロモンの濃い方向に移動
・エサを知らせるためにたくさんのフェロモンを地面につける
・障害物にぶつかった場合は向きを変える
・周囲に巣があれば、巣の中に入る
・上記モデルをシミュレーションに組み込んで、実行してみます。

実行してしばらくすると、行列ができましたね。 実行する度に行列のでき方が違うと思います。 何度か試してみて下さい。
エサまでの最短経路探索
できたばかりのアリの行列は、必ずしもエサと巣を結ぶ最短経路とはなりません。 しかし、シミュレーションの時間の経過とともに行列は徐々に巣とエサを短い距離で結ぶように変化していきます。 これは、なぜでしょうか?
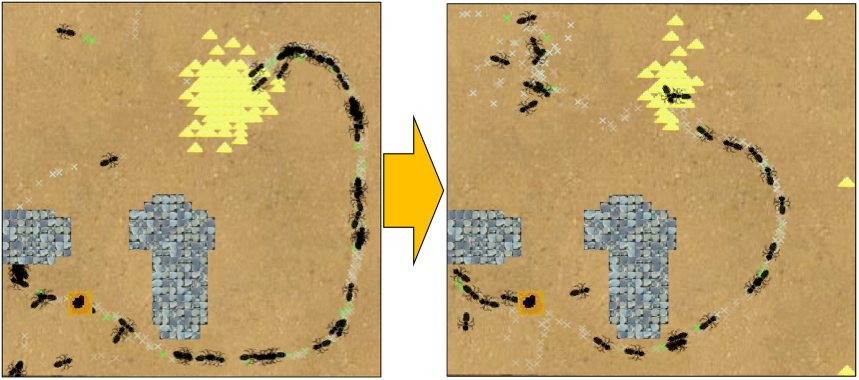
アリは、認知できる周囲からフェロモンの多い方向へ移動します。 そのため、カーブの部分の内側を移動します。 フェロモンは揮発するので、短時間により多くのアリが通らないと道が消えてしまいます。 そのため、フェロモンの道路のカーブ部分は、徐々に外側から内側へと変化し、真っ直ぐになっていきます。 結果的にアリは短い移動で効率よくエサを集めることができるのです。 この行列の変化の早さは、アリのフェロモン認知範囲の広さや、フェロモンの揮発の早さによって変わります。 これらのパラメータを変化させて、どのように行列が変化するか観察してみて下さい。
コントロールパネルのパラメータ
・揮発ステップ
フェロモンは時間とともに揮発して少なくなり、しばらくするとなくなってしまいます。この揮発するまでの時間を指定します。
・認知範囲
アリがフェロモンを認知できる範囲を指定します。認知範囲が広いほどより遠くのフェロモンを見つけることができます。
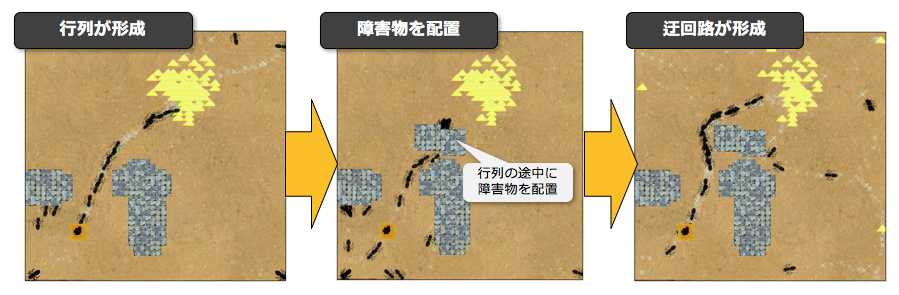
行列の途中に障害物を置いてみる
皆さんの中には、アリの行列の途中に障害物を置いたりして邪魔をした経験があるかもしれません。 アリは、突然現れた障害物によってフェロモンの道を見失ってしまい慌てふためきますが、しばらくすると障害物を迂回する行列が再び出来上がります。 今回のアリのモデルのシミュレーションでも迂回路ができることがわかります。
コントロールパネルのパラメータ
・手動配置
手動で配置するものを選択します。石(大、中、小)、エサ(大、中、小)から選択できます。マップ画面上をクリックすると選択したものがクリックした位置に配置されます。
参考文献
[1]. 西成活裕「クルマの渋滞 アリの行列 -渋滞学が教える「混雑」の真相」, 技術評論社, 2007
|
アリの行列モデル 基本情報 【モデルタイトル】:アリの行列モデル artisoc Cloud artisoc4【モデル考案者】:構造計画研究所 森俊勝 【artisocサンプルモデル作成】:構造計画研究所 森俊勝(original版), 矢代恵一,志村泰知(artisoc版) 【artisocサンプルモデル作成日】:(Orignal版)2003年2月, (artisoc版)2010年9月 |